
Learning / Implementation / Optimization / Contribution
Introduction
In addition to Mechanical Engineering, I completed several multidisciplinary projects cooperating with different departments, including Electrical Engineering, Computer Science, Aerospace Engineering, Robotics, Biomedical Engineering, Neuroscience, and so on...
Medium Blog
Visualization of Highly Customized Neural Network Model - Connection Matrix
This is for the visualization of a highly customized neural network model. Nowadays, much more complex models have been proposed for solving the real-world challenges. Fully-connected, forward-connected neural network is not the only option anymore. We may have recurrent connection, cross-layer connection, or inter-layer connection in our model.
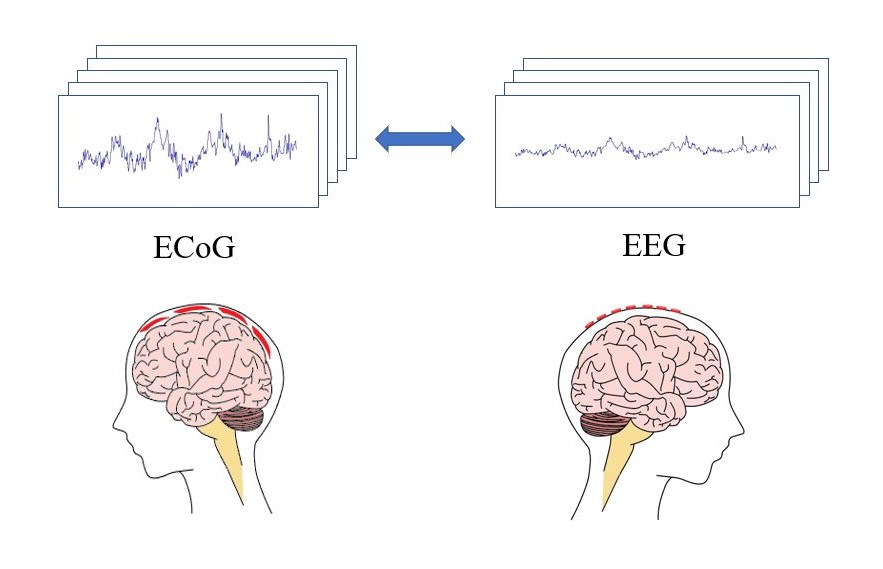
Signal Translation between EEG and ECoG
Study the electro-physiological relationship between EEG and ECoG, and then develop a model to estimate ECoG signals from EEG signals, in attempt to improve the non-invasive BCI performance. This is also my Master Thesis work.

EMG Based Control of Prosthetic Hand
Using forearm electromyography (EMG) signals as control input to control the prostheteic hands in LabVIEW in real-time. In other words, when the subject is moving index finger, prosthetic hand is also moving its index finger.

Neuro-Fuzzy System Based Classification
For offline analysis, neuro network algorithm can provide high performance on classification; but it is insufficient. In order to obtain even higher accuracy (93% or above), neuro-fuzzy system which consists of fuzzy-inference system and neuro-adaptive learning is the best candidate.
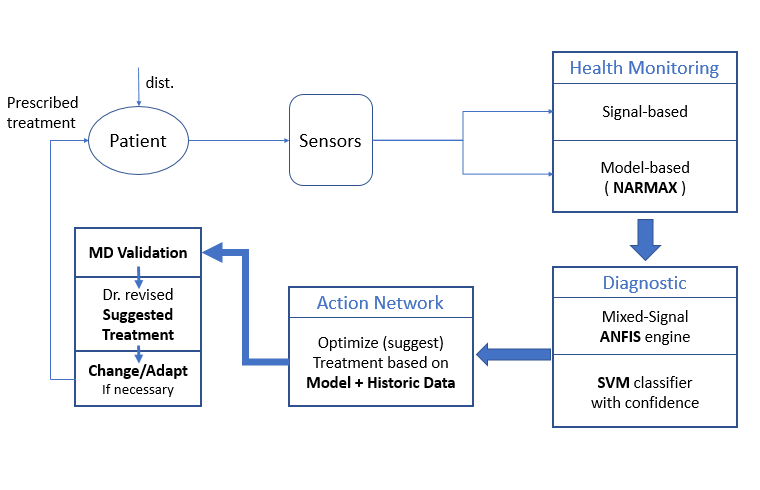
Intelligent Health Monitoring and Assessment System
With bio-signals acquired from tiny bio-sensing chips in real time, a smart health monitoring and assessment system is introduced. Computational models our group built can provide accurate diagnosis and prognosis of specific diseases. Besides, with growing awareness of precise medicine, personalized adaptive algorithm is also included.
Evolving Robotic System
Create a LabVIEW interface interacting with Activity Bot to solve the maze by itself. At the same time, the robot records where it has been and what it has seen, and then maps the maze that can be visualized in LabVIEW. Furthermore, let more robots walk in the maze, cooperate with each other and escape the maze more quickly.
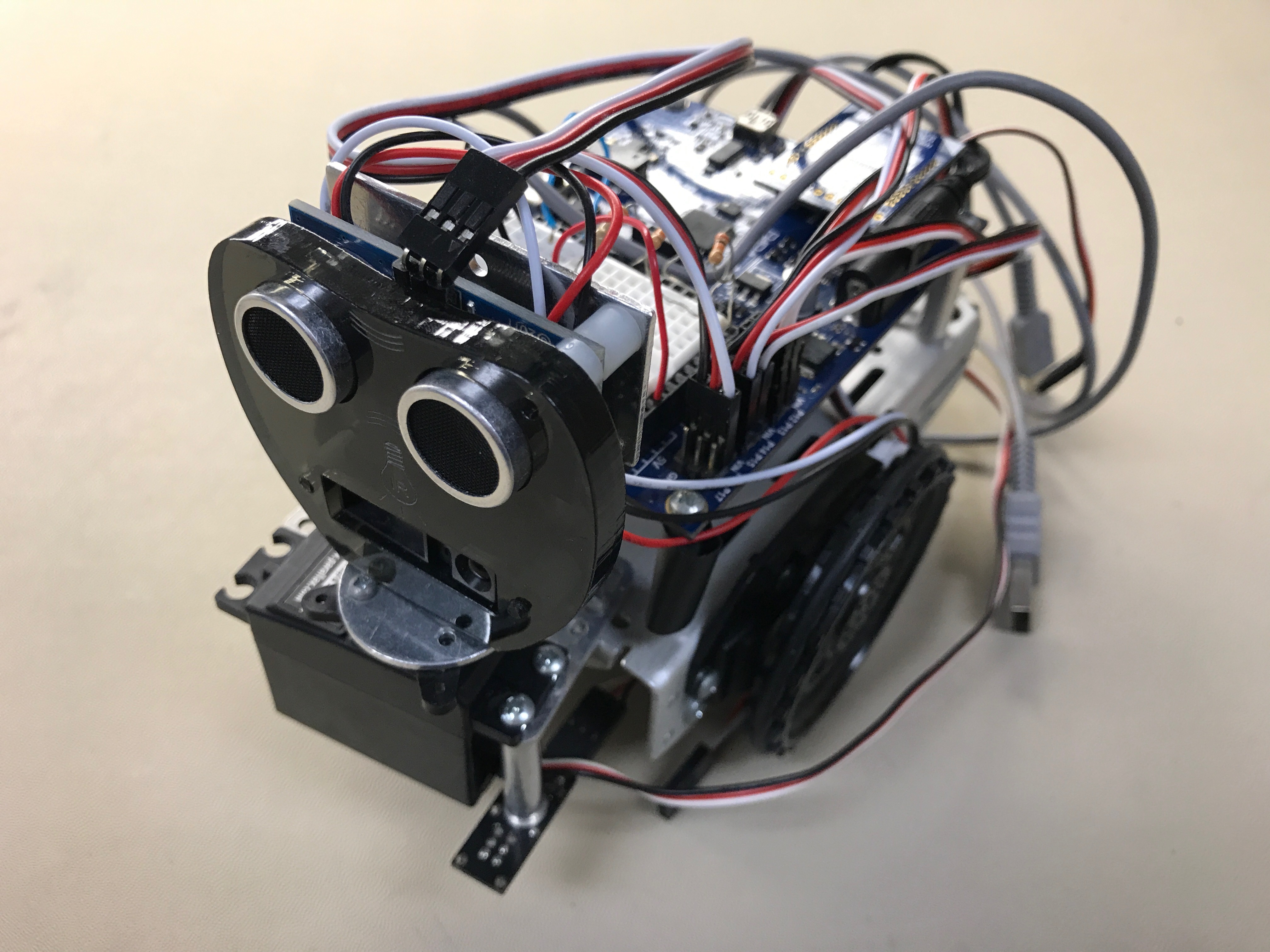
Inchworm Robot
Build a bio-inspired robot to perform more efficient movement. The robot we designed in AutoCAD and programmed in Arduino software (IDE) can mimic inchworm's behavior, being able to move efficiently with several different obstacles.